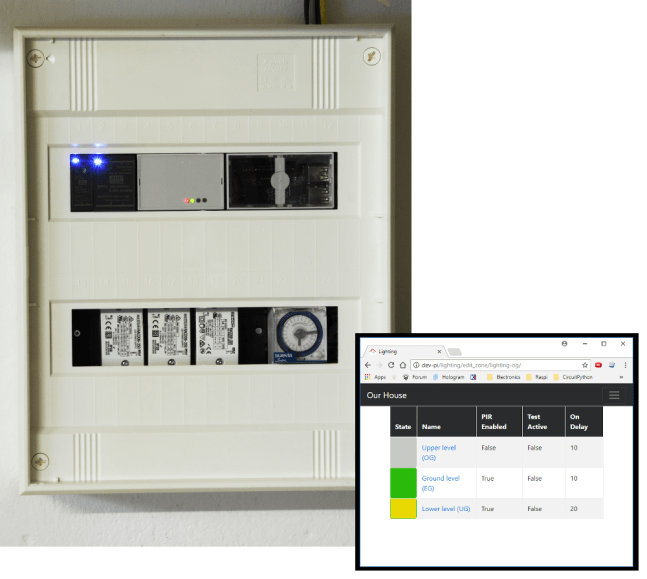
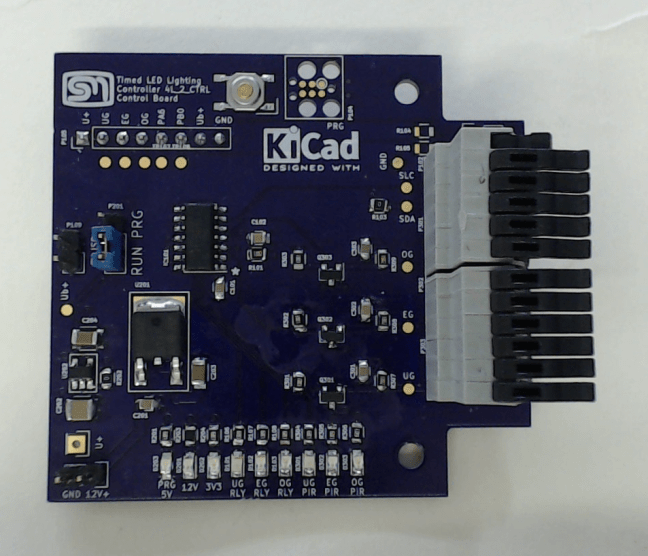
The Timed LED Lighting Control project has been driving the LEDs in our stairwell since 2017. The system is based on two modules. A custom built LED driver, which has been running faultlessly, and a Raspberry Pi + Django based user interface. This year the user interface module died. In this post, I describe the … Continue reading Upgrading the Stairwell Foot-lighting Project
Upgrading the Stairwell Foot-lighting Project